Information Theory and the Sensori-Motor Loop

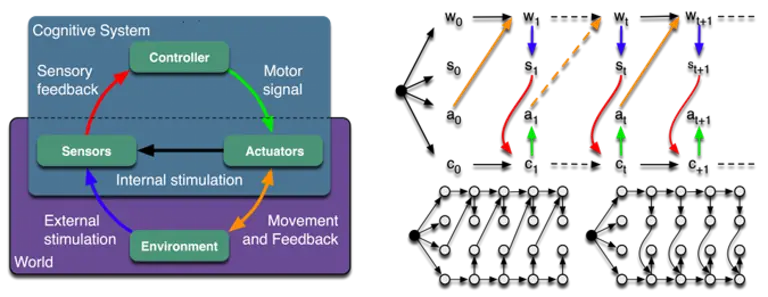
The field of Embodied Artificial Intelligence highlights the significance of embodiment and situatedness. Agents sense and act within the sensori-motor loop, which defines the context of learning including their morphology. The development of cognitive capabilities cannot be understood detached from this context. In this project, we study the way in which learning principles for embodied agents shape behavioural patterns that reflect morphology and environmental constraints. Particular behaviours of interest are exploration and body coordination. The ultimate goal of the project is to develop an information-theoretic understanding of the sensori-motor loop. Causal aspects, such as causal effects of acting on sensing, and their role in the context of autonomy and control play a central role to this end.
Further Information:
- Higher coordination with less control
- A Theory of Cheap Control in Embodied Systems
- Body-coordination
- Neuroinformatik, Uni. Leipzig
- Perception Action - An Interdisciplinary Approach to Cognitive Systems Theory
- Perspective Article on the Perception Action Workshop
- Workshop on Guided Self-Organisation (1st, 2nd, 3rd, 4th)
People
Collaborations
- Peter Keller
- Daniel Polani
- Tim Schröder
- Mikhail Prokopenko
- Frank Güttler
The information theory of individuality
In: Theory in biosciences, 139 (2020) 2, pp. 209-223A continuity result for optimal memoryless planning in POMDPs
In: RLDM 2019 : 4th multidisciplinary conference on reinforcement learning and decision making ; July 7-10, 2019 ; Montréal, CanadaMontréal, Canada : University, 2019. - pp. 362-365
Implementing Bayesian inference with neural networks
Dissertation, Universität Leipzig, 2019Morphological intelligence : measuring the body's contribution to intelligence
Cham : Springer, 2019. - xiii, 180ISBN: 978-3-030-20620-8, ISBN: 978-3-030-20621-5
Task-agnostic constraining in average reward POMDPs
In: Task-agnostic reinforcement learning : workshop at ICLR, 06 May 2019, New Orleans[S. L.] : ICLR, 2019.
Morphological computation : synergy of body and brain
In: Entropy, 19 (2017) 9, p. 456Morphological intelligence : information-theoretic quantifications of the morphological contribution to intelligence
Habilitation, Universität Leipzig, 2018Reinforcement learning of artificial microswimmers
In: Science robotics, 6 (2021) 52, eabd9285Uncertainty and stochasticity of optimal policies
In: Proceedings of the 11th workshop on uncertainty processing WUPES '18, June 6-9, 2018 / Václav Kratochvíl (ed.)Praha : MatfyzPress, 2018. - pp. 133-140
Morphological computation : the good, the bad, and the ugly
In: 2017 IEEE/RSJ international conference on intelligent robots and systems (IROS) : Vancouver, BC, Canada ; September 24-28, 2017New York, NY : IEEE, 2017. - pp. 464-469
NMODE - Neuro-MODule evolution
Self-organized behavior generation for musculoskeletal robots
In: Frontiers in neurorobotics, 11 (2017), p. 8Stochasticity of optimal policies for POMDPs
In: RLDM 2017 : 3rd multidisciplinary conference on reinforcement learning and decision making ; June 11-14, 2017 ; Ann Arbor, Michigan, USAMichigan : University, 2017. - T97
Compliant control for soft robots : emergent behavior of a tendon driven anthropomorphic arm
In: 2016 IEEE/RSJ international conference on intelligent robots and systems (IROS) : October 9-14 2016 ; Daejeon, KoreaNew York, NY : IEEE, 2016. - pp. 767-773
Evaluating morphological computation in muscle and DC-motor driven models of hopping movements
In: Frontiers in robotics and AI, 3 (2016), p. 42In search for the neural mechanisms of individual development : behavior-driven differential Hebbian learning
In: Frontiers in robotics and AI, 2 (2016), p. 37Information theoretically aided reinforcement learning for embodied agents
A theory of cheap control in embodied systems
In: PLoS computational biology, 11 (2015) 9, e1004427Causal models over infinite graphs and their application to the sensorimotor loop : general stochastic aspects and gradient methods for optimal control
Dissertation, Universität Leipzig, 2015Novel plasticity rule can explain the development of sensorimotor intelligence
In: Proceedings of the National Academy of Sciences of the United States of America, 112 (2015) 45, E6224-E6232Quantifying morphological computation based on an information decomposition of the sensorimotor loop
In: Proceedings of the european conference on artificial life 2015, ECAL 2015 / Paul Andrews... (eds.)Cambridge, MA : MIT Press, 2015. - pp. 70-77
The Umwelt of an embodied agent : a measure-theoretic definition
In: Theory in biosciences, 134 (2015) 3-4, pp. 105-116On the causal structure of the sensorimotor loop
In: Guided self-organization : inception / Mikhail Prokopenko (ed.)Berlin [u. a.] : Springer, 2014. - pp. 261-294
(Emergence, complexity, and computation)
On the cross-disciplinary nature of guided self-organisation
In: Guided self-organization : inception / Mikhail Prokopenko (ed.)Berlin [u. a.] : Springer, 2014. - pp. 3-15
(Emergence, complexity, and computation)
On the role of embodiment for self-organizing robots : behavior as broken symmetry
In: Guided self-organization : inception / Mikhail Prokopenko (ed.)Berlin [u. a.] : Springer, 2014. - pp. 193-221
(Emergence, complexity, and computation)
Robot learning by guided self-organization
In: Guided self-organization : inception / Mikhail Prokopenko (ed.)Berlin [u. a.] : Springer, 2014. - pp. 223-260
(Emergence, complexity, and computation)
Self-exploration of the Stumpy robot with predictive information maximization
In: From Animals to Animats 13 : 13th International Conference on Simulation of Adaptive Behavior, SAB 2014, Castellón, Spain, July 22-25, 2014 ; proceedings / Angel P. Del Pobil... (eds.)New York [u.a.] : Springer, 2014. - pp. 32-42
(Lecture notes in computer science ; 8575)
A measure-theoretic description of the intrinsic view of embodied agents
Behavior as broken symmetry in embodied self-organizing robots
In: Advances in artificial life, ECAL 2013 : proceedings of the twelfth european conference on the synthesis and simulation of living systems / Pietro Lió... (eds.)Cambridge, MA : MIT Press, 2013. - pp. 601-608
Causal effects for prediction and deliberative decision making of embodied systems
In: Advances in cognitive neurodynamics III : proceedings of the 3rd International Conference on Cognitive Neurodynamics 2011 ; [June 9-13, 2011, Hilton Niseko Village, Hokkaido, Japan] / Yoko Yamaguchi (ed.)Dordrecht : Springer, 2013. - pp. 499-506
(Advances in cognitive neurodynamics)
Information driven self-organization of complex robotic behaviors
In: PLOS ONE, 8 (2013) 5, e63400Linear combination of one-step predictive information with an external reward in an episodic policy gradient setting : a critical analysis
In: Frontiers in psychology, 4 (2013), p. 801Quantifying morphological computation
In: Entropy, 15 (2013) 5, pp. 1887-1915Guided self-organization : perception-action loops of embodied systems
In: Theory in biosciences, 131 (2012) 3, pp. 125-127Information-driven self-organization : the dynamical system approach to autonomous robot behavior
In: Theory in biosciences, 131 (2012) 3, pp. 161-179The playful machine : theoretical foundation and practical realization of self-organizing robots
Berlin : Springer, 2011. - XIII, 333(Cognitive systems monographs ; 15)
ISBN: 978-3-642-20253-7, ISBN: 978-3-642-20252-0
Higher coordination with less control : a result of information maximization in the sensorimotor loop
In: Adaptive behavior, 18 (2010) 3/4, pp. 338-355Transposing simulated self-organizing robots into reality using the plug and learn architecture
In: Proceedings of the International Conference on Fuzzy Computation and International Conference on Neural Computation : Valencia, Spain, October 24 - 26, 2010[Setuball] : SciTePress - Science and Techn. Publ., 2010. - pp. 350-357
Predictive information and emergent cooperativity in a chain of mobile robots
In: Artificial Life XI : Proceedings of the Eleventh International Conference on the Simulation and Synthesis of Living SystemsCambridge, MA : MIT Press, 2008. - pp. 166-172
Predictive information and explorative behavior of autonomous robots
In: The European physical journal / B, 63 (2008) 3, pp. 329-339YARS : A physical 3D simulator for evolving controllers for real robots
In: Simulation, modeling, and programming for autonomous robots : first international conference, SIMPSR 2008 Venice, Italy, November 3-7, 2008 proceedings / Stefano Carpin... (eds.)New York : Springer, 2008. - pp. 75-86
(Lecture notes in artificial intelligence ; 5325)
Adaptive behavior control by self-regulating neurons
In: 50 years of artificial intelligence : essays dedicated to the 50th aniversary of artificial intelligence / Max Lungarella... (eds.)Berlin : Springer, 2007. - pp. 196-205
(Lecture notes in computer science ; 4850 : Lecture notes in artificial intelligence)
Homeokinesis : a new principle to back up evolution with learning
In: Computational Intelligence for Modelling, Control and Automation / Masoud Mohammadian (ed.)Amsterdam [u.a.] : IOS Press, 1999. - pp. 43-47
(Concurrent Systems Engineering Series ; 55)